Управляемые риски в «ПиццаБот»: кейс аварийного контура
Любая система может дать сбой. Вопрос в том, был ли он предусмотрен. В «ПиццаБот» мы заранее прогнозируем технологические риски и закладываем решения для их контроля. Один из таких кейсов — аварийный контур.

Что может пойти не так?
Внутри киоска «ПиццаБот» работает сложная технологическая связка: манипулятор, 7-я ось, исполнительные узлы, электроника и программная логика. Если в одном из элементов возникает сбой — например, зависает управление или нарушается логика движения — система может продолжить выполнение команды некорректно. В таком сценарии манипулятор способен выйти за пределы допустимой траектории и повредить конструкцию киоска или узлы внутри.
Как мы решили эту потенциальную угрозу?
В киоск «ПиццаБот» мы заложили отдельный уровень защиты — аппаратный аварийный контур. По краям движения манипулятора установлены концевые датчики. Когда он достигает критической точки, происходит физическое отключение привода:
- остановка происходит мгновенно;
- она не зависит от состояния программы;
- система остаётся безопасной даже при полном зависании.
Как мы тестировали это решение?
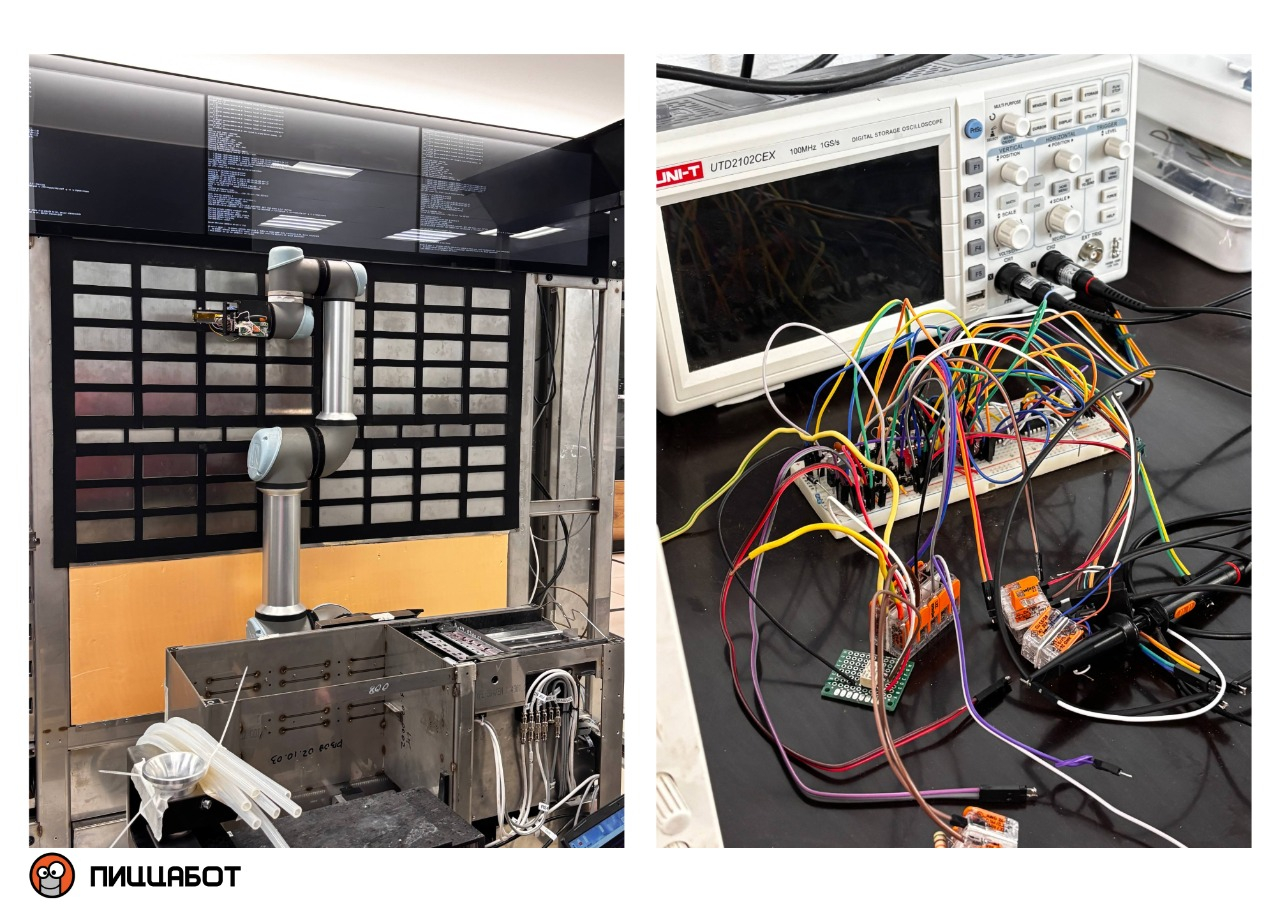
После сборки прототипа мы не ограничились проверкой самого факта работы аварийного контура. Задача была убедиться, что он стабильно работает в реальных сценариях, включая сбои. На этапе прототипа мы вручную тестировали концевые датчики, моделировали крайние положения манипулятора и проверяли поведение системы при отклонениях. Это позволило выявить слабые места: скорость реакции требовала доработки, а срабатывание — повышения стабильности.
Далее мы переработали схему и уточнили логику работы контура. После этого повторные тесты показали нужный результат. Плата аварийного контура была собрана в финальном исполнении и интегрирована во второй киоск. Здесь мы проверяем его работу в составе всей системы — вместе с 7-й осью, манипулятором и остальными узлами.
Мы собираем киоск «ПиццаБот» как систему, в которой риски не накапливаются с ростом, а контролируются на уровне конструирования. Если вам близок наш подход, приглашаем вас к сотрудничеству — пишите нам в сообщество ВКонтакте.